
Background
During my internship at Cineplex Digital Media, I was exposed to the challenges of digital out of home signs. One of the most important systems in digital out of home signs is the ability to count the number of people who were exposed. Currently, we use cameras, however these have many privacy concerns which lead us to use third party services (Quividi) as a legal moat. Being able to count heads without cameras could allow us to not rely on these services.
LiDAR is an interesting technology because it does not detect identifying features, hence it is far better for privacy concerns. To explore this technology and its viability for people detection, I got my hands on an RPLiDAR A1 and used it to build Sentinel.
Architecture
Sentinel has three main parts: the LiDAR sensing perception pipeline, the ML training pipeline, and the web tool for visualization and control. The tech stack is mixed mostly between Python and TypeScript: the detection code and model live in Python, and the UI lives in a Next.js app.
Hardware Setup
The RPLidar A1 is a cheap 360° laser that connects via USB. It spins 5-10 times per second and measures distances at different angles. The laser can see up to 12 meters away, but for this project I limited the range to 4 meters to focus on nearby people and reduce wall reflections.
Perception Pipeline
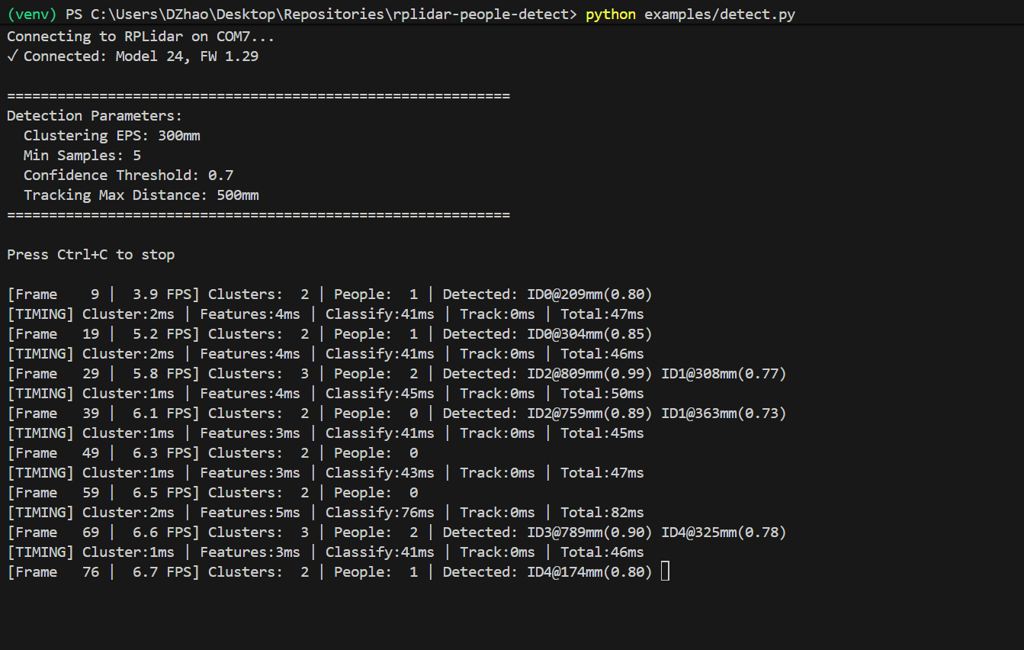
The perception pipeline runs continuously 5-10 times per second. It's purpose is to detect points in the LiDAR scan and cluster them into objects. The PersonDetector class wraps the entire pipeline and maintains its state between frames. Each laser scan is converted from polar coordinates to cartesian, then DBSCAN clusters nearby points into objects.
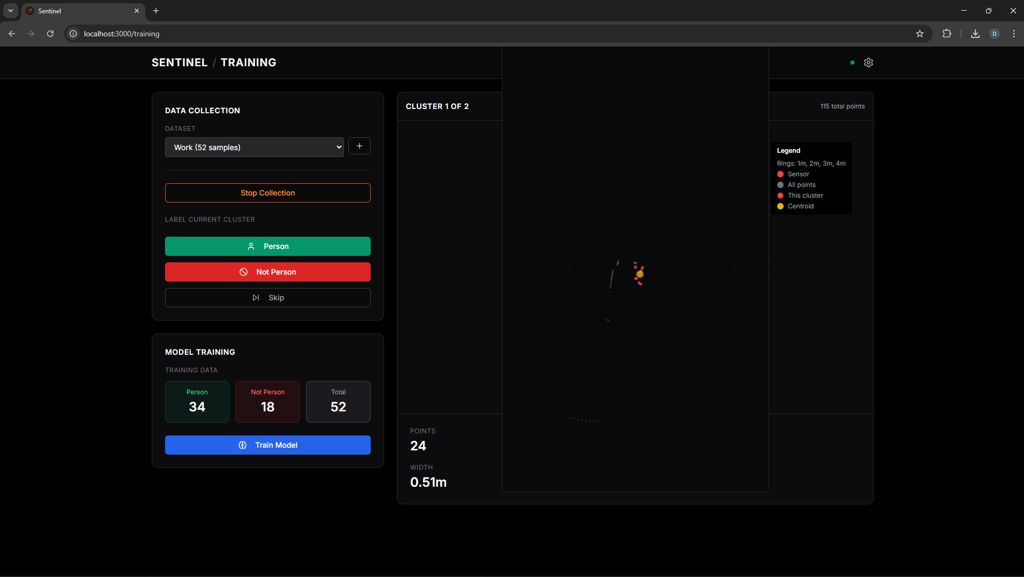
Feature Extraction & Classification
After clustering, each cluster is converted into a feature vector. The user is then required to label the cluster as a person or furniture through the web interface. This is used to train a Random Forest classifier, which was chosen because it's fast on CPU and handles the feature set well.
Tracking
Once people are detected, the tracker maintains consistent IDs across frames. It matches new detections to people from the previous frame, marks unmatched people as missing, and removes them after 5 frames (~1 second). New unmatched detections receive new IDs.
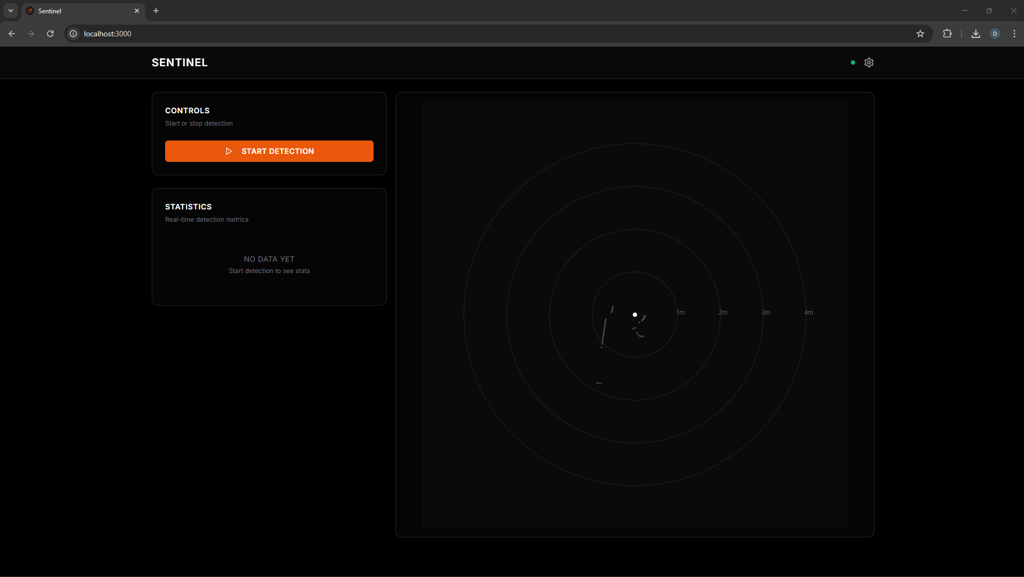
The web dashboard provides real-time visualization and debugging. It's built with Flask + Socket.IO on the backend and Next.js on the frontend. The frontend renders a live point cloud visualization with color-coded clusters (green = person, red = not-person) and per-person info cards showing ID, distance, confidence, and point count.
Results and Takeaways
Sentinel was an interesting proof of concept for a simple person detection system using LiDAR technology. Though the system was able to successfully detect people in a variety of scenarios, it was limited a lot by the hardware constraints of the RPLidar A1. Nonetheless, the system showed the viability of LiDAR for this use case, and it prepares a foundation for future work with more advanced 3D LiDAR sensors.